ユーザー通信205号 5面抜粋:ヤマシタワークス:エアロラップ+ロボットに「2号機」の新展開
ヤマシタワークス
ロボットシステムを外付けから内部搭載へ
エアロラップ+ロボットに「2号機」の新展開
INTERMOLD2019/東京では動画紹介を予定
― 安全性・研磨剤漏れ防止
・ロボット稼働域の可変などメリット
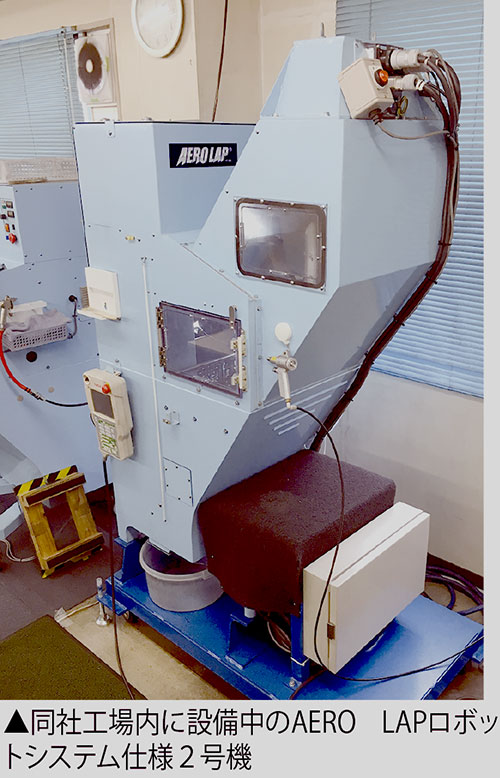
ヤマシタワークス(本社=兵庫県尼崎市西長洲町、山下健治社長)では、自社開発・製造する鏡面仕上げ装置『AERO LAP(エアロラップ)』とロボットシステムによるコラボレーションを、一昨年来深耕してきているが、今年からはもう一段、違った展開に入っている。
昨年まではあくまで、「外付け」でのロボット仕様(ロボットハンド)により、外にあるワークを、アームでエアロラップ内に入れ、回転させ処理(磨き)し、処理後は外に出し、置く、というのが「一連の流れ」だったが、新たにつくられた2号機では、ロボットがエアロラップのなか自体に組み入れられた。
「これにより、安全性、研磨剤(MultiCorn)の漏れ防止や、ロボットの可動域・位置の可変ができるといったメリットを得た。このスタイルでのロボット仕様を、今後はPRしていく」と浜田賢治統括部長。
同社は自動車向け金型の製造・加工を中心に、近年では医薬品用金型の製造、拡販に注力しているが、「この受注をこなしていくための自社設備としても、やはりロボットの力は非常に便利。それは、薬剤用の金型は自動車向けとは違い、数百本単位での同一ロット数が多く量産に向いているので、ロボット化、省人化で効果が出しやすいから」と続ける。
実際に、このエアロラップのロボットシステム仕様により、「1人分(仕事量)が0・8人分浮いた。つまり従来の1工数が0・2工数で済んでいる」との数字が示されており、「残った0・2工数の人手とは、エアロラップ内部でのパレットの移動、ワーク交換といった作業であり、これが次の課題」と現状を話す。
なお、INTERMOLD2019/東京では、この実機こそ登場しないものの、動画による紹介を検討中。

2019年4月12日